目前,工业应用中以第 代工业机器人为主。第 代工业机器人主要是指只能以示教再现方式工作的工业机器人,称为示教再现机器人。示教内容为机器人操作结构的空间轨迹、作业条件、作业顺序等。那么,现实生活中,我们在进行与工业机器人沟通的依据是什么呢?
答案是:笛卡尔坐标系。
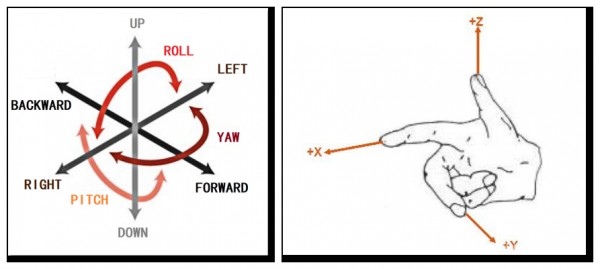
总所周知,自由度是指描述物体运动所需要的独立坐标系。同样,在工业机器人的 里,我们也是在此基础上创建 个三维的 。它以空间的 点0为原点,建立3条两两相互垂直的数轴,即X轴、Y轴和Z轴,且3个轴的正方形符合右手规则。
 会员业务:企业认证:技术支持:
会员业务:企业认证:技术支持: 新闻投稿:战略合作:
新闻投稿:战略合作:
沪公网安备31012002006133


